控制型驱动器,是在普通型驱动器的基础上,将 [步进±], [方向±] 和 [使能/脱机±] 这三对输入信号端口当作IO信号输入端口,[就绪±] 端口当作信号输出端口,无须上级PLC或控制器的脉冲信号,即可完成约定的简单控制功能。
普通型驱动器包括低压超小型,低压通用型和高压通用型步进驱动器都可以定制为控制型驱动器,并且适用于两相、三相和五相步进电机。
下面以高压两相通用型步进驱动器AHD8626为例,介绍几种驱动器的定制方案。
- 实 例 A
- 实 例 B
- 实 例 C
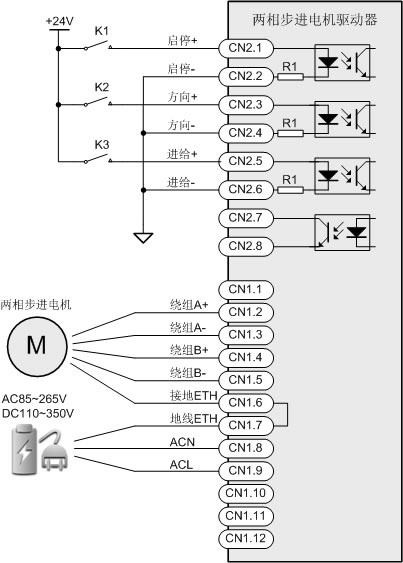
用户需要启停和转向功能,启动后以固定速度运行。
控制方案如右图,详细功能如下所述。
1、CN2.1接启停开关K1。
K1闭合:电机开始以约定速度运行。
K1断开:电机停止运行。
2、CN2.3接方向开关K2。
K2闭合:电机正转。
K2断开:电机反转。
3、CN2.5接进给开关K3。
每闭合K3一次,电机转动180度。
4、启停过程会有加速曲线,使运行更加平稳。
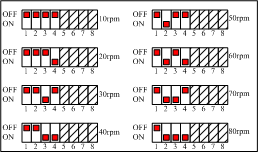
5、可通过拨码在断电情况下进行调速,速度档位
根据客户需要,此处示例如下:
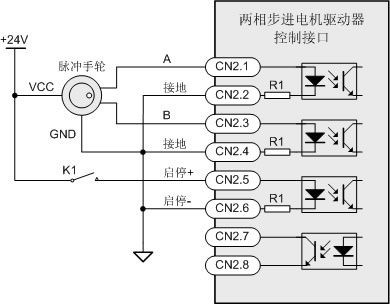
用户需要连续调速功能,配合脉冲手轮(编码器)即可实现调速功能。驱动器控制接口接线图如右图所示,详细功能如下所述。
1、CN2.1脉冲手轮A信号。
2、CN2.3脉冲手轮B信号。
3、CN2.5接进给开关K1。
K1断开:电机停止运动。
K1闭合:电机以手轮决定的速度转动。
4、假定手轮一圈有100档,每旋动1档,速度提升2rpm。即最低速0rpm,最高速200rpm。
5、每次驱动器断电,速度参数归0。
6、每旋一档代表的速度,可根据客户需要调节。
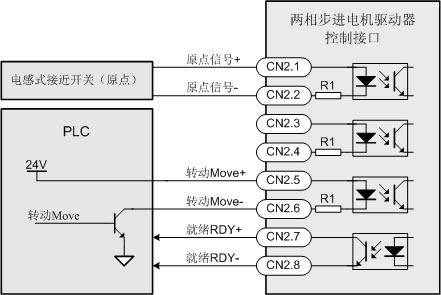
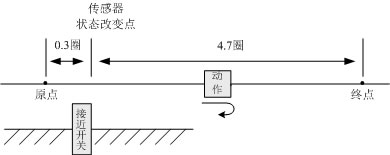
用户需要完成固定行程,且每次运动后需要复位。
右边是运动示意图和驱动器控制接口接线图。
1、CN2[1..2]连接原点附近接近开关信号。
CN2[1..2]光耦断开:动作块不在原点范围内。
CN2[1..2]光耦导通:动作块在原点范围内。
2、CN2[5..6]接PLC动作信号。
CN2[5..6]光耦每导通一次,动作块先正转5圈,
再反转5圈。
3、CN2[7..8]Ready信号输出至PLC。
CN2[7..8]光耦导通:驱动器处于等待下一个
信号状态。
CN2[7..8]光耦导通:驱动器正在动作或发生故障,
不能接收新的指令。
4、运动过程: 先正转5圈, 再反转,一直到接近
开关位置处, 接近开关状态改变后,减速运行
0.3圈,达到平稳停止的效果。
目标运动示意图
定制驱动器接线图